SOME THESIS PROPOSALS:
robotics
vision systems

augmented reality
control systems
In the list below are some examples, which can be discussed and adapted to the student's interests.
master's degree path is not important, all students interested in deepening the proposed topics are welcome.
robotics
vision systems
augmented reality
control systems
In the list below are some examples, which can be discussed and adapted to the student's interests.
master's degree path is not important, all students interested in deepening the proposed topics are welcome.
Force-controlled Milling with a Robotic Spindle and an ABB Robot
The aim of this thesis project is to create a working test bench for the use of a spindle mounted on a 6-axis manipulator robot and be able to perform a machining operation optimizing dimensional precision and surface quality thanks to the information coming from a 6-axis force/torque sensor. A first step should be learning some basics about standard milling operations on multi-axis machines. Then we will perform some machining tests with an ABB IRB120 6-axis robotic arm mounting a robotic spindle and a OnRobot 6-axis force/torque sensor.
Then you will try to define some online adapting rules for improving the machining results using the force and torque information from the sensor. First the milling operation should be a simple 3-axis operation and then can be extended to a full 5-axis machining.

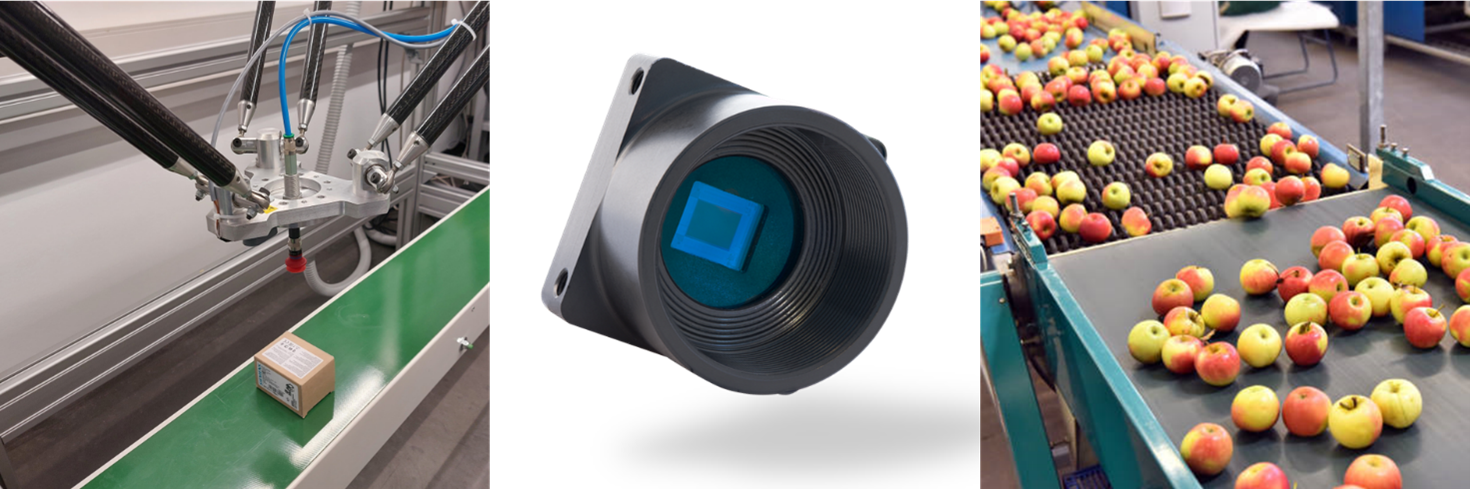
High-speed pick and place of unpredictable moving objects with a vision in the loop system
The thesis proposal concerns the control of a Linear Parallel Kinematic Robot for the pick and place of objects using a real-time vision system placed on the end effector of the robotic system. The result should be a cutting-edge solution able to pick up unpredictable moving objects, like rolling spheres, form a moving belt conveyor. The first step is the definition of the motion control system of the robotic device, including kinematic and dynamic analysis. Then a deepening of vision systems and the use of a high speed 2D industrial camera must be performed to set up a high speed and low delay recognition of the objects on the conveyor. At the end some experimental tests should be performed in order to create some performance statistics of the system created.
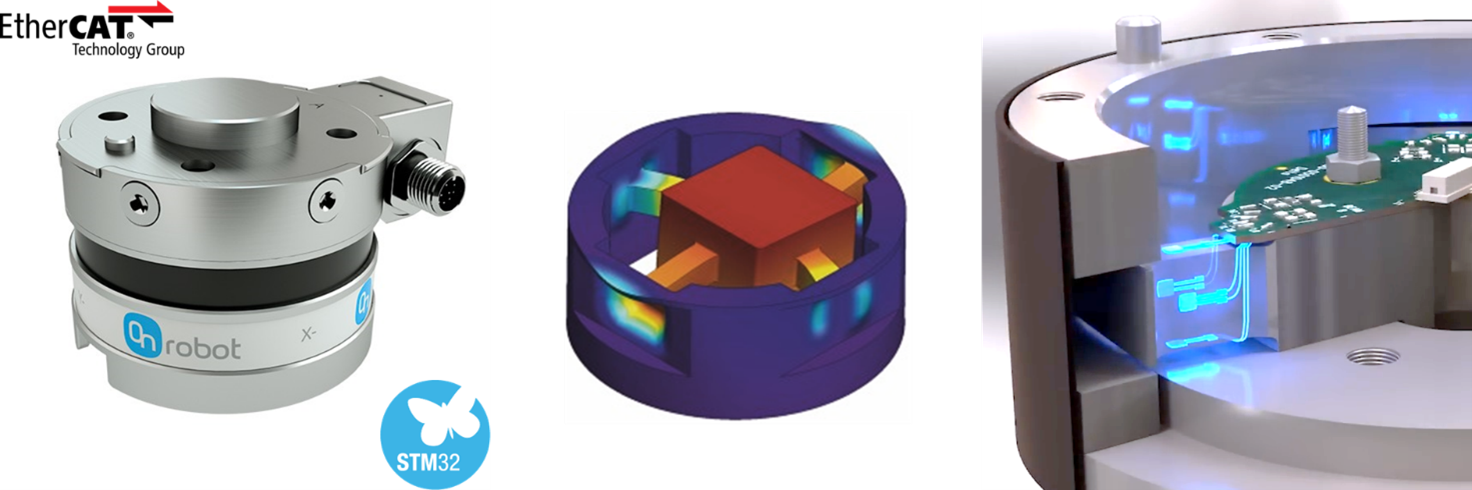
Desing of a 6-axis EtherCAT Force/Torque Sensor for Robotic Applications
The aim of the project is to define the requirements, design and perform all testing and calibration of a 6-axis force/torque sensor suitable for robotic handling, machining and for the use with haptic devices. The first step is to define an appropriate sensor geometry, make some FEM analysis of the sensor behavior and define the number and best placement of strain gauges. Then can be interesting building a custom electronic board for the signal acquisition chain and onboard elaboration. The last part to implement could be the EtherCAT industrial communication protocol slave interface for letting the sensor interfacing with modern robotic and automation systems. At the end will build the sensor and calibrate it in the lab.
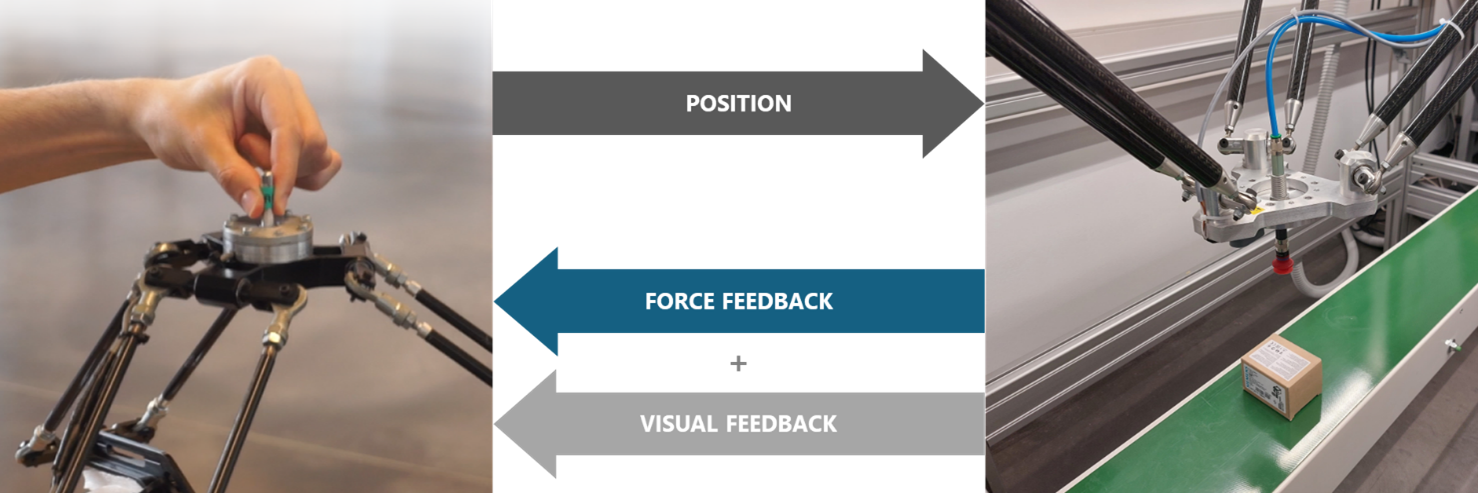
Development of a Test Bench for the User Experience Analysis of a Haptic Teleoperated Robotic System
The goal of this project is the development of a 3-dof force teleoperated robotic system for understanding the personal feeling of people in using kinesthetic haptic feedback. For this project two robotic systems will be involved. A delta-like haptic interface with 3D movement and force capability and a linear delta robot for high-speed pick and place operations with the same 3D motion capabilities. The idea is to set up a full bilateral force teleoperated system and define a specific task to be performed by some users. Then you should record the performance of the user during the execution of the operation with and without the force feedback and draw up a statistic. The result should hopefully tell us, in an objective way, whether haptic feedback can improve the performance of certain operations.
Desing and Testing of a Low Friction Linear Haptic Device with Redundant Actuation
The aim of the project is to design and test a linear axis build with very low friction in mind. Secondly, the addition of a redundant actuation with high bandwidth will be considered to improve the haptic feedback fidelity. The project requires choosing all the motion control chains; from transmission types to motor drive units. The use of an EtherCAT fieldbus for communication with the control unit is always recommended for achieving the best performances available. Thanks to the presence of very low friction, the haptic device can also be used without a force sensor and some comparisons can be made between open and closed force loop control of the system. The result of the project will be the definition of new control strategies for a high-fidelity haptic device with redundant actuation and low characteristic friction.

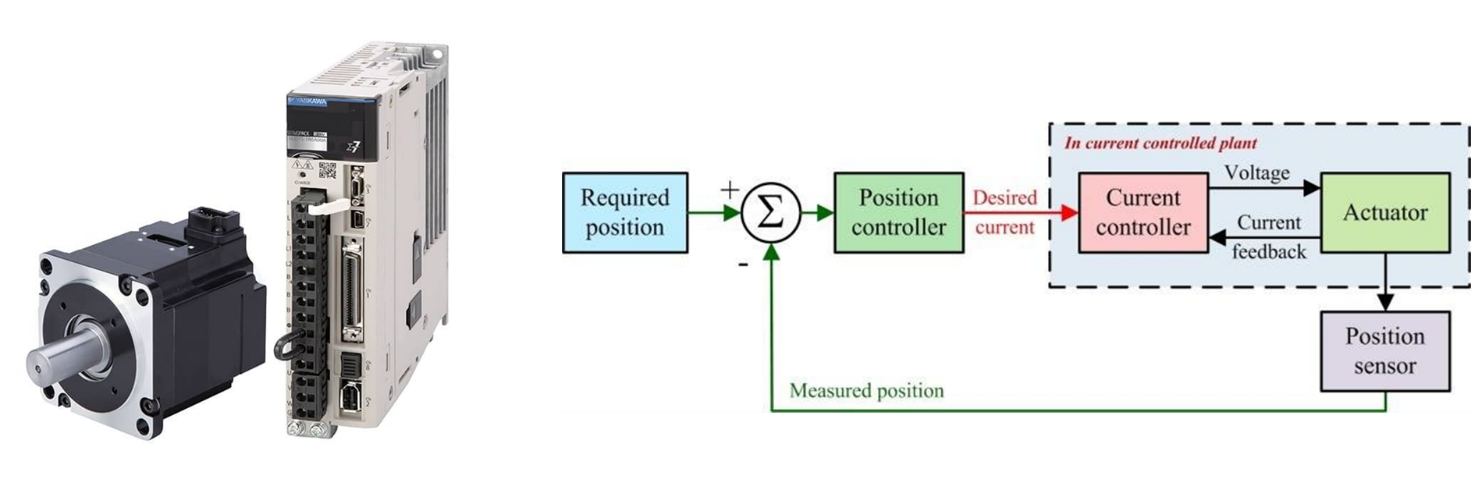
Experimental Performance Analysis between Different Motor Control Loop Closing Points
This experimental investigation is based on the conceptual idea that real systems performances are strictly related to the used hardware in the testbench. Motor control performance can be hardly influenced by communication delays, sensors resolution, motor power amplifier bandwidth and so on. The presence of these non-idealities gives a meaning in where position and speed control loops are closed in our system. They can be computed inside the standard industrial motor drive unit or inside a centralized control unit with custom control algorithms. You will try to show how this design choice influences the final control performance of a robotic system.
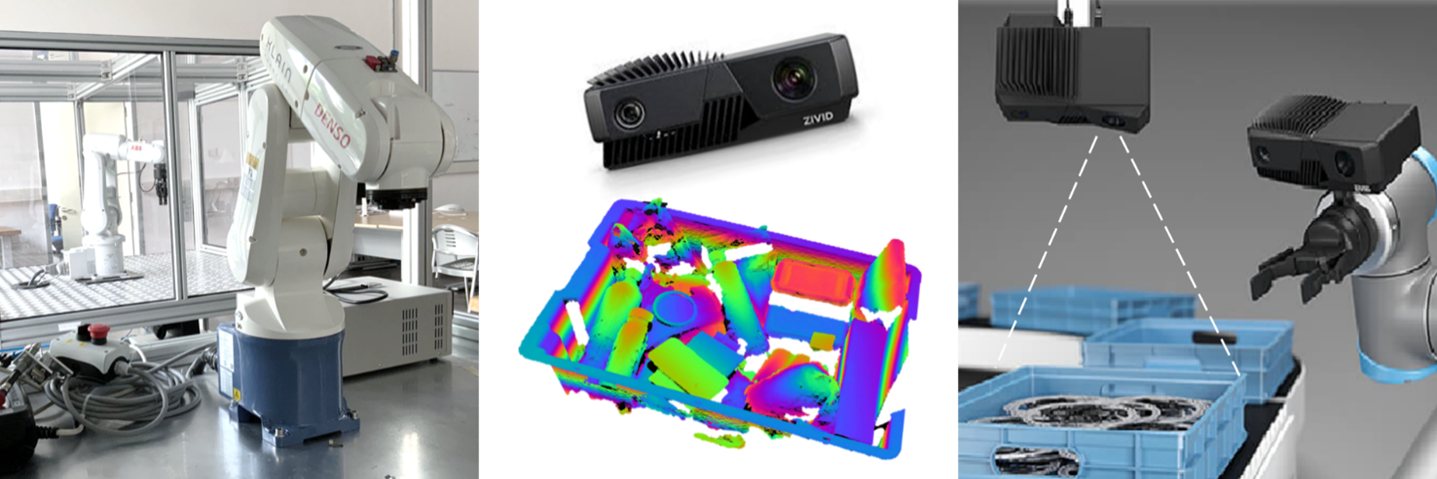
Determination of an Optimal Grasping Point of Unknown Objects with High Resolution 3D Camera
The aim of the project is the setup of a robotic cell with a Denso 6-axis manipulator and a High-Resolution 3D Zivid industrial camera managed by a control system based on ROS2. The objective is the computing of optimal picking point of unknow geometry objects, based on the 3D point cloud taken by the camera. Then an appropriate trajectory should be planned to pick and place the object in the workspace.
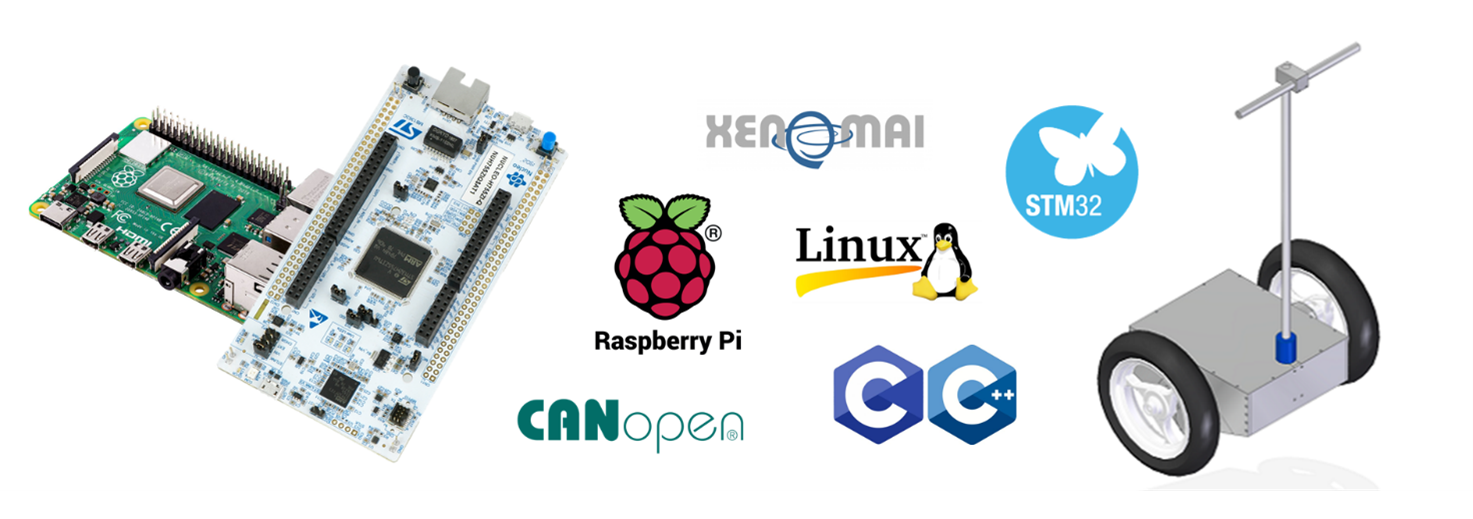
Development of a Real-Time Control Systems on ARM/STM32 for a Self-balanced Vehicle
The purpose of this thesis work is the realization of a Real-Time system for the control of a self-balancing vehicle. Specifically, the interest of the work is the comparison between different Linux based systems to create a Real-Time platform: including for example Xenomai 3/4. On the other hand, the system could also be developed considering the latest high performance STM32 microcontrollers with the support of related development boards. A second important aspect is the creation of a dynamic model of the vehicle and the synthesis of the motor control system to allow the vehicle to stay in balance.